第二章 程序设计基础知识
第9节 图
图(Graph)是一种复杂的非线性结构。在人工智能、工程、数学、物理、化学、生物和计算机科学等领域中,图结构有着广泛的应用。
一、图的定义
点用边连起来就叫作图,严格意义上讲,图是一种数据结构,定义为graph=(V, E) 。V是一个非空有限集合,代表顶点(结点),E代表边的集合。
二、图的相关概念
-
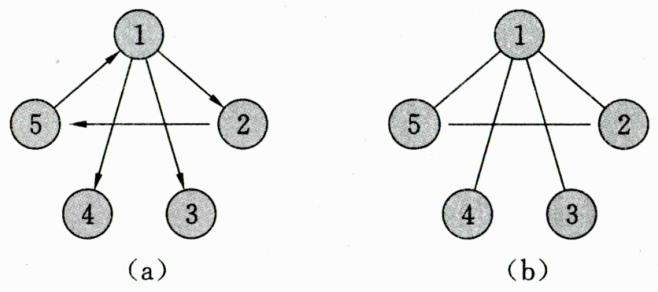
有向图:图的边有方向,只能按箭头方向从一点到另一点,(a)就是一个有向图。
-
无向图:图的边没有方向,可以双向,(b)就是一个无向图。
-
结点的度:无向图中与结点相连的边的数目,称为结点的度。
-
结点的入度:在有向图中,以这个结点为终点的有向边的数目。
-
结点的出度:在有向图中,以这个结点为起点的有向边的数目。
-
权值:边的“费用”,可以形象地理解为边的长度。
-
连通:如果图中结点U,V之间存在一条从U通过若干条边、点到达V的通路,则称U、V是连通的。
-
回路:起点和终点相同的路径,称为回路,或“环”。
-
完全图:一个n阶的完全无向图含有 条边,一个n阶的完全有向图含有 条边。
-
稠密图:一个边数接近完全图的图。
-
稀疏图:一个边数远远少于完全图的图。
-
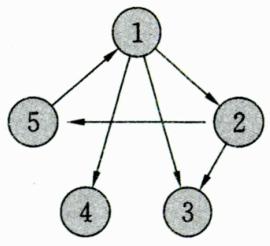
强连通分量:有向图中任意两点都连通的最大子图。右图中,1-2-5构成一个强连通分量。特殊地,单个点也算一个强连通分量,所以右图有三个强连通分量:1-2-5,4,3。
三、图的存储结构
-
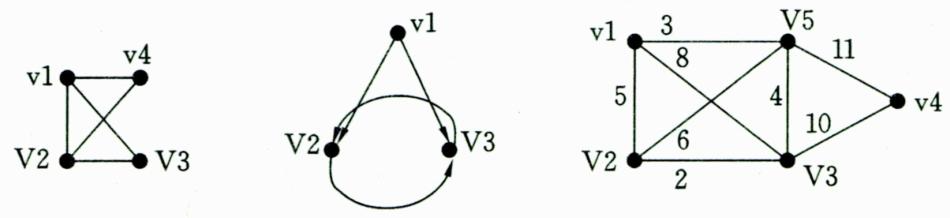
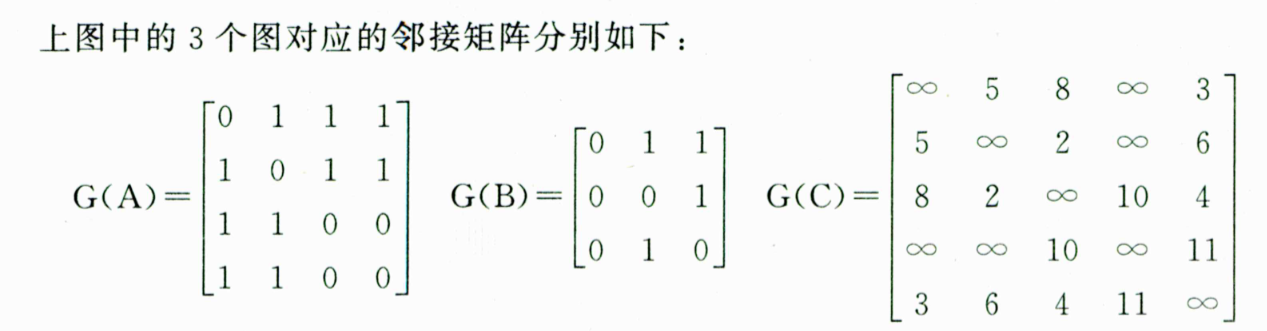
二维数组邻接矩阵存储:图的邻接矩阵存储方式是用一个二维数组(称邻接矩阵)存储图中的边或弧的信息。它适用于稠密图。 定义
int G[101][101],其中G[i][j]表示从点i到点j的边的权值,定义如下:
-
邻接表存储结构:邻接表是一种将数组与链表相结合的存储方法,其具体实现为:将图中顶点用一个一维数组存储,每个顶点
Vi的所有邻接点用一个单链表来存储,链表中存放与当前结点相邻的结点在数组中的下标,适用于稀疏图。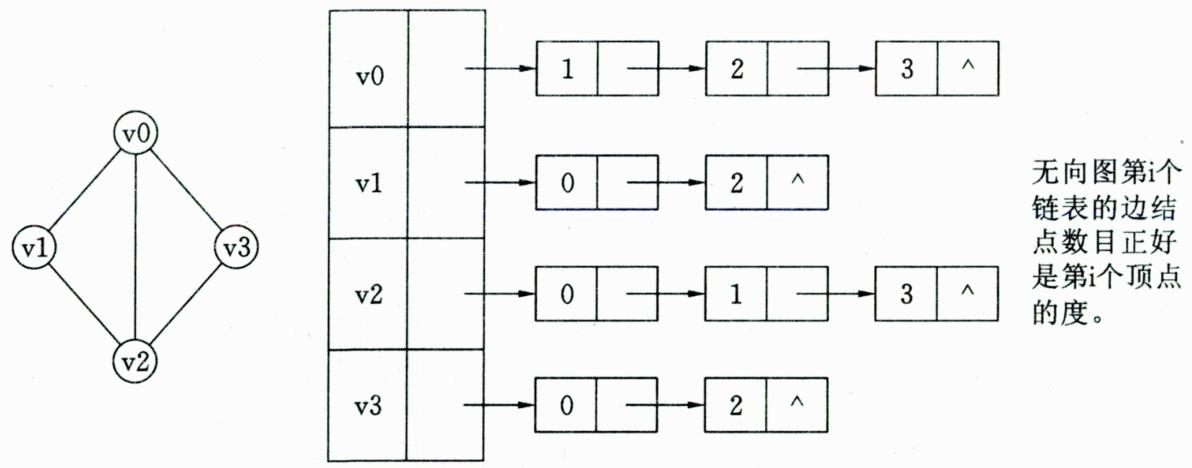
对于具有n个结点、e条边的无向图,邻接表中数组有n个顶点结点、链表有2e个边结点。
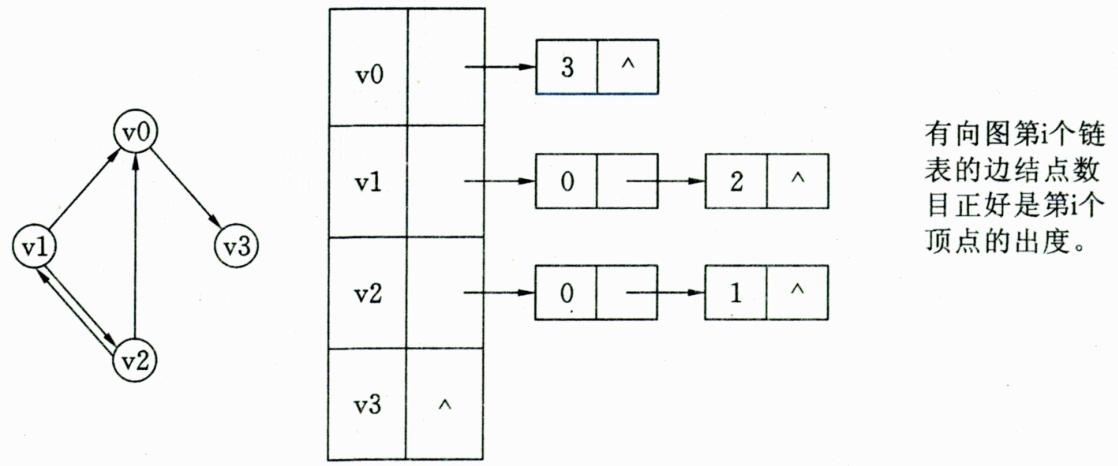
对于具有n个结点、e条边的有向图,邻接表中数组有n个顶点结点、链表有e个边结点。
四、深度优先与广度优先遍历
从图中某一顶点出发系统地访问图中所有顶点,使每个顶点恰好被访问一次,这种运算操作被称为图的遍历。为了避免重复访问某个顶点,可以设一个标志数组visited[i],未访问时值为false,访问一次后改为true。图的遍历分为深度优先遍历和广度优先遍历两种方法,两者的时间效率都是 。
-
深度优先遍历:深度优先遍历与深度搜索算法相似,从一个点A出发,将这个点标为已访问
visited[i]=true,然后再访问所有与之相连且未被访问过的点。当A的所有邻接点都被访问过后,退回到A的上一个点(假设是B),再从B的另一个未被访问的邻接点出发,继续遍历。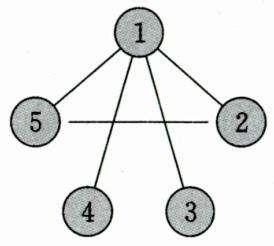
-
广度优先遍历:广度优先遍历并不常用,从编程复杂度的角度考虑,通常采用的是深度优先遍历。
广度优先遍历和广度优先搜索相似,因此使用广度优先遍历一张图并不需要掌握新的知识,在原有的广度优先搜索的基础上,做一些小的修改,就变成广度优先遍历算法。
五、一笔画问题
如果一个图存在一笔画,则一笔画的路径叫作欧拉路,如果最后又回到起点,那这个路径叫作欧拉回路。 定义奇点是指跟这个点相连的边数目有奇数个的点。对于能够一笔画的图,有以下两个定理。 定理1:存在欧拉路的条件,图是连通的,有且只有2个奇点。 定理2:存在欧拉回路的条件,图是连通的,有0个奇点。 两个定理的正确性是显而易见的,既然每条边都要经过一次,那么对于欧拉路,除了起点和终点外,每个点如果进入了一次,一定要出去一次,显然是偶点。对于欧拉回路,每个点进入和出去次数一定都是相等的,显然没有奇点。 求欧拉路的算法很简单,使用深度优先遍历即可。 根据一笔画的两个定理,如果寻找欧拉回路,对任意一个点执行深度优先遍历;找欧拉路,则对一个奇点执行深度优先搜索,时间复杂度为O(m + n),m为边数,n是点数。